ICM-42688内蔵 9軸センサー6軸9軸回転ベクトル 3軸オイラー角 MAX1000Hz同時出力 ROS/ROS2対応 USB接続
¥ 29161 円(10%消費税込)
在庫数:8
商品コード: haya-imu v3.x
9軸IMU/AHRS haya_imu v3.xはMicrochip製Cortex-M4(クロック周波数120MHz)、TDK製6軸ICM-42688(ICM-20948後継機種)、MEMSIC製高精度AMR方式3軸地磁気センサMMC5983MAの実装により、通常出力モード、DEMOモード、キャリブレーションモード(初期バイアス測定モード)、6軸フュージョン回転ベクトルクォータニオン、9軸フュージョン回転ベクトルクォータニオン、3軸オイラー角の同時出力は最大1000Hz(ベスト・エフォート)まで可能。ROS/ROS2パッケージリポジトリ公開済み。USB TypeCコネクタ接続【令和5年4月〜新発売】
主な仕様
・型番 haya_imu v3.x
・内蔵チップ Microchip Cortex-M4(120MHz)、ICM-42688-V、MMC5983MA実装
・外部接続 USB(Full-Speed 12Mbps) Type-C、USB+5V給電
・最大出力レート
- 6軸/9軸フュージョン回転ベクトル四元数 1000Hz
- 3軸オイラー角 1000Hz
- 3軸加速度(アクセル)データ 1000Hz
- 3軸角速度(ジャイロ)データ 1000Hz
- IMU内部温度データ 1000Hz
- 3軸地磁気(コンパス)データ 500Hz
・測定レンジ
- 加速度(アクセル)センサ ±8g
- 角速度(ジャイロ)センサ ±2000dps
- 地磁気(コンパス)センサ ±800µT(±8G)
・バイアス測定補正 初期バイアス測定、動作時即時測定、内蔵補正機能あり
・消費電力 150mW以下(環境温度21℃ 実測値)
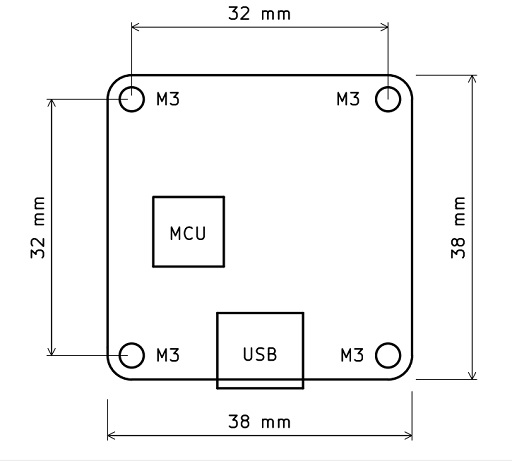
・寸法 38.0mm × 39.0mm × 4.8mm(突起物含む)
・取付穴 M3x4、隣り合う穴の中心間距離32.0mm
主な特長
・サービスモード 通常出力モード、デモンストレーションモード、キャリブレーションモード
・結果出力 6軸フュージョン回転クォータニオン、9軸フュージョン回転クォータニオン、3軸オイラー角1KHzまで同時出力、結果出力レートに関わらずIMU/地磁気センサのデータサンプリング周波数、フュージョン周波数は常に1000Hz/500Hzに設定済み
・初期バイアス測定 使用環境変化あった際に利用可能なキャリブレーションモードで最短数分程度で初期バイアス測定完了、MCUフラッシュに自動的に保存して、動作時に読み込んで即時バイアス測定&補正あり
・地磁気センサ温度補償 地磁気センサは、計測時間1msにわたるセットリセット計測(温度補償機能)使用済み
・磁気外乱による干渉 受けにくいことが当社実験環境(磁束密度約2G)にて確認済み
・ROS/ROS2対応 本体にはROS/ROS2ライブラリを実装せず、対向装置にROSパッケージインストールにより対応可能
・MCU内蔵USB(Full-Speed 12Mbps)コントローラ使用のため、1ms以上遅延あるシリアル→USB変換IC(FTDI等)不使用
追加説明
・6軸フュージョンの基準0度方位=IMUの初期方位、9軸フュージョンの基準0度方位=磁東方向、6軸、9軸フュージョン回転ベクトル四元数、3軸オイラー角同時出力
・対向デバイスOS/ROS環境 Ubuntu 20.04/ROS noetic、Ubuntu 18.04/ROS melodic、Ubuntu 16.04/ROS kinetic 推奨、Ubuntu 24.04/ROS2 jazzy、Ubuntu 22.04/ROS2 humble 推奨
・最大出力レートはhaya_imuの実力値、実効値は対向装置のリソースパフォーマンスに関わります
・掲載規格はセンサICの検証または特性評価から得られたデータであり、生産での保証ではありません
・令和5年9月まではICM-42688-V実装、令和5年9月以降はICM-42688-V、ICM-42688-P区別せず出荷します
・当社の環境において初期バイアス測定を済ませて出荷しますが、環境要素の変更によりユーザ様のもとで再度ご測定願います
・haya_imu_ros2パッケージにおけるROS2メッセージタイプ[sensor_msgs/msg/imu]出力対応済み[2024/10/29]
リリース情報
・ v3.4 2024年1月(最新版)
・ v3.2 2023年4月
参考資料
エンコーダ付きDCモータPID制御の実験-haya_imu応用例
haya_imuユーザーマニュアルv3.4(最新版)
haya_imuROSパッケージ | Githubリポジトリ
haya_imuROS2パッケージ | Githubリポジトリ
ICM-42688-V データシート
MMC5983MA データシート
販売情報
入荷日:令和6年7月22日(月)
販売日:令和6年7月25日(木)、7月22日入荷分