
ICM-20948内蔵9軸センサー6軸/9軸フュージョン 低遅延 USB出力 補正済み ROS対応
¥ 22660 円(10%消費税込)
在庫数:10
商品コード: Hayate-imu_v2.5
9軸IMUセンサhayate_imu、低消費電力プロセッサーCortexM0+、TDK ICM-20948使用、6軸/9軸フュージョン・クォータニオンは低遅延出力、別途ソフトでフュージョン必要なし、最大出力レート225Hz、同時に加速度3軸データ225Hz、角速度3軸データ225Hz、地磁気3軸データ70Hzまで出力可能、補正済み、ROS対応。ロボット、ドローン等低遅延が必要とされる電子機械の科学研究、検証試作ヘの活用が期待されます。V2.5最新版。
V2.5 主な変更点
TDK Smart Motion DMPコードリビジョンに伴うファームウェアのアップデート、ROS パッケージ更新はありません。
V2.4 主な変更点
較正モードの追加により、ジャイロスコープ、加速度センサ、地磁気センサの初期バイアスは出荷時の測定のみならず、お客様のもとでも測定することはできる。環境要素は大いに変わった際、較正モードで初期バイアスの再測定を推奨する。詳細について、ユーザーマニュアルをご確認ください。
主な仕様
・ 型番 hayate_imu V2.5 rev.C 6軸 or 9軸フュージョン(R5年12月最新版) ※0
・ 内蔵チップ Cortex-M0+、TDK Invensense ICM-20948(9軸)実装 ※1
・ 外部接続 USB Type-Cコネクタ、USB+5V給電 ※2 ※3
・ 最大出力レート ※4
- rev.C 6軸or9軸フュージョン回転ベクトル四元数 225Hz ※5
- 加速度(アクセル)3軸センサ 225Hz
- 角速度(ジャイロ)3軸センサ 225Hz
- 地磁気(コンパス)3軸センサ 70Hz
・ 測定レンジ
- 加速度(アクセル)センサ ±16g
- 角速度(ジャイロ)センサ ±2000dps
- 地磁気(コンパス)センサ ±4900µT
・ 補正機能 即時補正あり
・ 標準偏差(RMS-Noise) ※6
- 加速度(アクセル)センサ ±0.026313m/s^2(ノイズ帯域幅136Hz)
- 角速度(ジャイロ)センサ ±0.0032520rad/s (ノイズ帯域幅154.3Hz)
- 地磁気(コンパス)センサ ±0.8µT
・ 消費電力 50mW以下(環境温度21℃ 実測値)
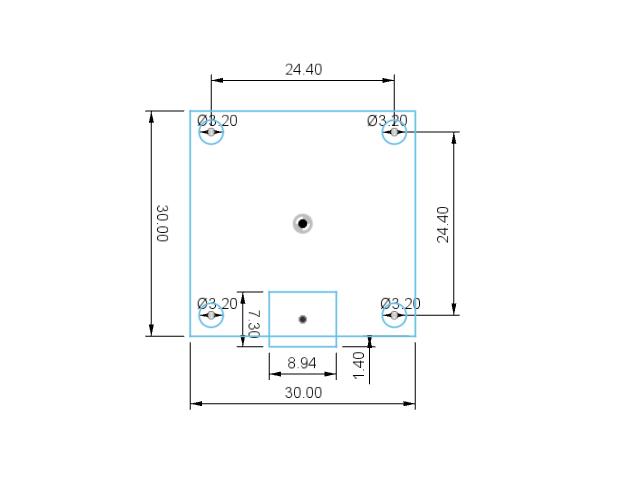
・ 寸法 30mm × 31.4mm × 4.8mm(突起物含む)
・ 重量 4g以下
・ 取付穴 M3x4、隣り合う穴の中心間距離24.4mm
※0 6軸フュージョンの基準方位はIMUの初期方位、9軸フュージョンの基準方位は磁北から東方向に90度回転後の方向(磁東方向)、パラメータの設定により6軸または9軸フュージョン回転ベクトル四元数が出力可能
※1 内蔵SAMD21とICM-20948間インターフェースはSPI(4Mbps)使用
※2 IMU対向装置(USB接続先)OS環境 Ubuntu 16.04 18.04 20.04 推奨
※3 IMU対向装置(USB接続先)ROS環境 kinetic melodic noetic 推奨
※4 最大出力レートはhayate_imuの実力値、IMU対向装置(USB接続先)での実効値はその装置のリソース(CPUクロック周波数、メモリ容量・速度)に関わる
※5 初期バイアス測定済み。また動作時バイアスのリアル測定および補正ある。地磁気センサが、周囲にある磁気物体の影響を受けやすい場合がある
※6 ICM-20948内蔵パーツの検証または特性評価から得られたデータであり、生産での保証ではない
リリース情報
・ V2.5 Dec 2023(最新版)
・ V2.4 Mar 2023
・ V2.0 May 2021
・ V1.1 March 2021
デモ(YouTube)
参考資料
エンコーダ付きDCモータPID制御の実験-hayate_imu応用例
hayate_imu v2.5 User Manual(最新版)
hayate_imu ROSパッケージ | Githubリポジトリ
9軸IMU ICM-20948 Cortex-M0+内蔵 低遅延 USB出力 ROS対応 | ROBOT翔・技術情報
Migrating from MPU-9250 to ICM-20948-InvenSense | TDK InvenSence
http://wiki.ros.org/ja/9dof_hayate_imu
追加生産分
令和5年11月、追加生産いたしました。生産上都合によりオレンジLEDは青LEDまたは、赤LEDに置き換えられる場合がありますので、ご承知おきください。
後継機種に関するお知らせ
令和5年4月末より、後継機種の「9軸センサー6軸&9軸回転ベクトル 3軸オイラー角 MAX1000Hz同時出力 ROS/ROS2対応 USB接続」は発売となりました。ご利用のほどよろしくお願い申し上げます。




